Project Peregrine II (2016)

Peregrine II 10K COTS
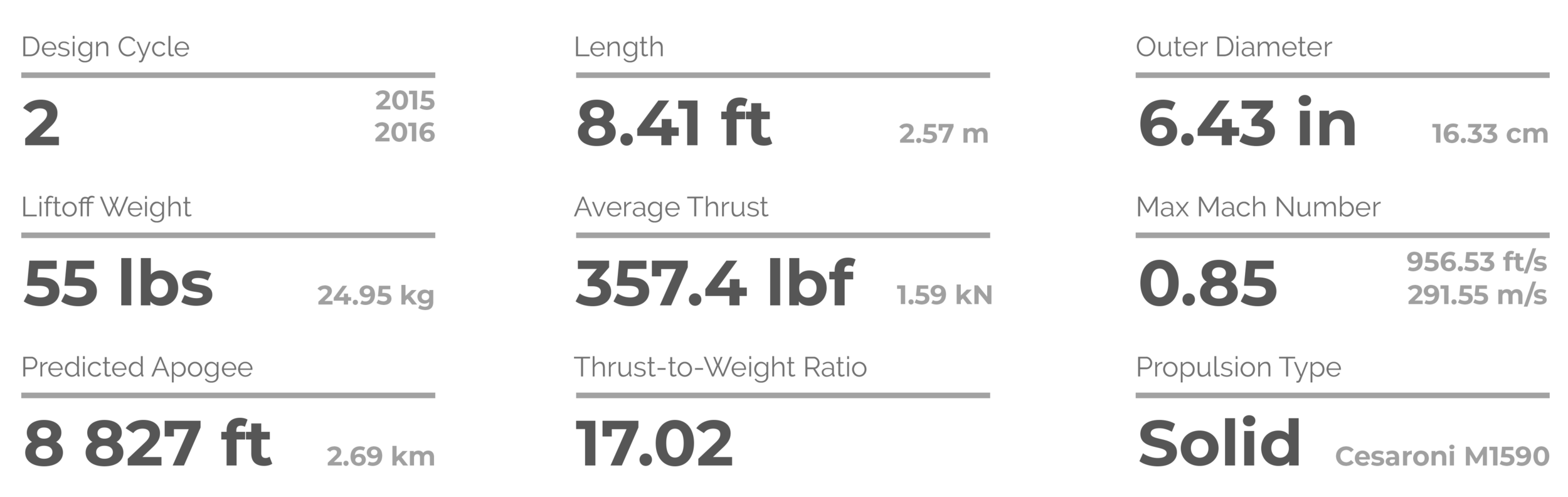
This year’s project, Peregrine MU-02, is a 10 ft. sounding rocket, that is fully student built and designed to perform optimally and safely at competition. Peregrine MU-02 features an innovative decoupling mechanism as well as an avant-garde payload.
The aerodynamics sub-team was able to design and fully manufacture the external structure of the rocket. First, our Von Karman nose cone 5:1 ratio, is designed to reduce the aerodynamic drag and improve the stability of the rocket. Second, the rocket consists of two body tubes made of carbon fibre to allow for easy access to different compartments in the rocket. Third, the fins were 3D printed with a coupling “slot” on the first body tube, and then fully reinforced with carbon fiber, and fixed to the rest of the rocket. Additionally, our team was able to design an improved fin-alignment mechanism.
Finally, our rocket includes boat tail to which the engine retaining ring will be attached.
All in all, Peregrine MU-02 measures 10 ft long, with a 6.4” diameter and fully carbon fiber fuselage.
Our decoupling mechanism, a two-sided coupler located between the two main body tubes containing both male and female components, will allow a controlled safe black powder explosion, that will be ignited with an e-match at the altitudes needed to deploy the parachutes and payload. The first body tube contains both the payload and the main parachute that will be ejected using a piston. The second body tube contains the drogue chute and the main electronics bay.
The avionics for the MU-02 Peregrine Rocket consists of three separate modules. The first module is a closed loop system that acts as the decoupling event trigger. The decoupling module consists of a microcontroller, an altimeter (arming trigger), several e-matches and an internal software timer (main trigger).
The second module is the the Rocket Telemetry Module. This module serves to give an accurate data on the position, attitude, internal temperature, internal barometric pressure, acceleration and velocity of the rocket. This is accomplished by use of a GPS, Inertial Measurement Unit, Barometric Pressure, Temperature and Altimeter sensors.
The final module in the rocket is the communications array. It consists of a transmitter circuit onboard the rocket (placed between the shell of the boat-tail and the engine block) and the receiver connected to a laptop on the ground. Made of the LoRa 868 XBee Radio Communication Breakouts, this module allows for communication between the rocket and ground station.
The Autonomous Deployable Aerial Mechanism (A.D.A.M) is a miniature deployable quadcopter. Upon ejection from the rocket, an on-board parachute will decelerate the payload until arms are elevated and parachute is decoupled. A flight controller continuously balances the payload. Using GPS, the payload will then land itself.
The purpose of the payload is a proof of concept for small ejectable drones to study foreign atmospheres.
Results
Spaceport America Cup 2016
10K COST Category: 29th/45